
The steering gear system is an indispensable part of any vessel. The steering gear controls the function of the rudder system, which in turn, controls the manoeuvring or turning of a vessel from time to time.
The most important cornerstone in the design of any steering gear is the transfer of forces required to control the rudder system such that the vessel turns or changes direction accordingly.
Imagine turning a large crude oil tanker from its initial heading direction by an angle of 45 degrees in rough weather conditions. By pulling levers at the bridge deck or pressing buttons or digitised display screens in modern designs, the huge vessel turns by the desired angle in a few minutes!

Thanks to the meticulous and advanced design of steering gear systems.
Even though in older vessels like steamships with mostly mechanical systems, the process was more difficult and involved more time, the underlying principle of operation was the same: transfer of moment to the rudder, which would scale up this moment values to such large indices that the vessel would turn to the desired orientation.
Most of you must be familiar with the use of jacks in changing car tires. The basic principle of operation is what we call the mechanical advantage or the amplification of forces such that an application of a small amount of force would result in a large value sufficient to lift a full-sized car.
The same principle was used extensively in the steering gear mechanism in older ships. After advancements in hydraulic technologies, most designs of steering gear mechanisms became guided by hydraulically driven systems. Now, most steering gears of most ships employ either of the two types of systems:
- Electro-hydraulic
- Full electric
While electro-hydraulic systems employ the principles of hydraulic with the component systems and connection units driven by electricity, an all-electric or fully electric system is the most powerful one (usually found in all modern designs) and simply controls rudder motions using automated motors and systems fully driven by high-voltage electrical power. Electro-hydraulic systems, in turn, use two types of mechanisms: ram type and vane type.
One very important component of a typical electro-hydraulic system is the hunting gear mechanism. Remember, this has nothing to do with real hunting!
Hunting gear mechanism and its need
Before knowing the function of a hunting gear mechanism, it is important to have a brief knowledge of the layout and working of a basic electro-hydraulic steering gear mechanism in ships. The steering gear system broadly comprises three parts:
- Control Systems and equipment: All these are the various paraphernalia and equipment receiving the primary instructions from the bridge or navigation deck. In the bridge deck, the primary decision of a manoeuvre is applied by the master or the captain. These control systems, in unison, activate the rest of the system and transmit the signals, directly connecting to the rudder apparatus. In most modern vessels, these comprise transmitters, receivers, cabling, piping and primary electrical motors and pumps.
- Powering Units: Main source of power supply to the rudder systems. These comprise high-capacity pumps, motors, generators, alternators, and supply points activated by the control systems.
- Transmission Units: These directly absorb the high voltage electrical power from the powering and main supply units and convert them into mechanical and hydraulic power required to operate the main steering gear block in the desired manner. These have not only the responsibility for power transmission but also for driving the rudder unit in the desired manner.
- Main Steering Gear or the rudder unit: Comprises the rudder and the associated turning units.
When we speak of the associated mechanisms, the first thing that comes to our minds is the tiller which is directly coupled with the rudder and turns it accordingly based on the moment applied. This final driving moment is derived from the hydraulic forces due to pressure changes in a directly connected pump for all practical purposes.
The pump is mechanically operated by a floating lever gauge which, in turn, runs on electric power and works based on the instructions from a telemotor that receives transmitted electrical signals from the control units and is connected to one end of this lever.
The telemotor is an important component that acts as an intermediate member in this sequence of operations. The function of the telemotor is two-fold. Firstly, it receives electrical signals from the bridge deck through its transmitter. Then it further connects this signal to the receiver located in the main steering gear compartment.

The receiver further transmits these signals to the control and powering units that have the main task of driving the steering gear system. So, the telemotor is a part of the transmission unit of the steering gear system.
A telemotor is a hydraulic control system with an extensive network and runs from the bridge deck to the steering gear system through cables and supporting pipelines along with suitable charging units. All modern telemotors are of electrical type, while the older vessels used mechanically linked systems that comprised the telemotor unit.
A detailed description of a telemotor is complicated and beyond the scope of this article.
Now note above that one of the main tasks of the telemotor is conveying the electrical signals to the control units responsible for turning the rudder unit to the desired rotation angles under the application of a desired torque or turning moment.
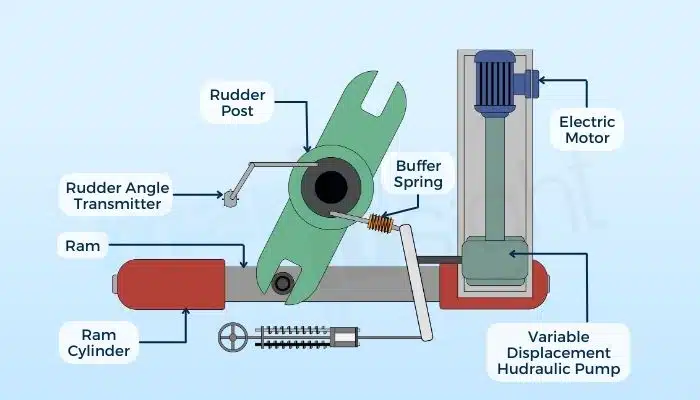
This control unit is a crucial link between the telemotor and the powering unit, supplying the torque to the tiller and, finally, the rudder. Thus, under the interplay of the powering and the control units, the rudder receives the necessary power in the desired direction to turn the vessel, as marked in the schematic below.

Now, think of the process in reverse. What happens after the rudder orients in the desired deflection and the vessel achieves the required angle of turn? This is where the hunting gear mechanism comes into action. The Hunting gear mechanism is designed to operate in the reverse direction and transfer the resultant action of the rudder back to all the connecting units above.
After the rudder makes the desired turn, the action is captured by the hunting gear system, and this, in turn, arrests the operation of the powering unit cutting off the supply required to produce large rudder moments. After the powering to the rudder unit ceases, all other interconnecting components of the steering gear receive these feedback signals.
Moreover, as a result, the hunting gear also repositions the position of the floating lever or control rod (to a neutral position) mounted on the hydraulic variable displacement pump mentioned above, changing the latter’s pressuring conditions, strokes, and delivery. The hunting lever is connected to one end of this lever (the other end being the telemotor system, as mentioned above). Hence, a hunting gear is essentially a feedback control mechanism for the steering gear.
Hunting gear can be more simply visualised with the example of a car’s power steering. When you turn the car in the desired direction and release the wheel, the steering automatically disengages, and the turning is stopped in the desired direction.
But for older cars with manual steering, the driver had to put more effort into repositioning the vehicle in the new direction and stopping the turning by moving the wheel in the reverse direction. This is a viable option for cars as you have a decent amount of control over your vehicle and a fairly accurate sense of understanding the motions on the road.
But this is next to impossible for ships. Here you cannot simply ‘make a turn’ as any form of error in the deflection angles can change the entire course of heading even without your knowledge of infinite spans of water.
An exact and definite angle of turn-in values always needs to be specified from the bridge deck or navigation deck. Furthermore, after the rudder is instructed to make that deflection, there needs to be a way to ensure that after the accurate turn is achieved, there has to be a mechanism to ascertain that and, at the same time, cut off the powering to the systems such that the entire process of turning comes to an immediate halt. In large ships travelling in seas, this is never achievable by human effort.
Another important related usage of hunting gear is that it acts as a constant reciprocator that repositions the rudder angle when the set deflection is disturbed by waves and other sea conditions, which is quite normal. The principle remains the same: any deflection of the rudder configuration is captured by this hunting gear, and it initiates the other connected equipment, and these, in unison, once again recenters the rudder back to its original angle.
However, physics is not very difficult. In a nutshell, this is the case of reaction defined by Newton’s third law, where the rudder moment is added to the hunter mechanism, which then gets activated and puts the rest of the steering gear mechanism to a complete stop. The detailed functioning of hunting gear is very complicated and beyond our scope.
In modern ships with advanced technologies, along with electrical, mechanical, electromechanical, and hydraulic signals, hunting gears also extensively employ automation and digitalised systems that further streamline the process.
Disclaimer: The authors’ views expressed in this article do not necessarily reflect the views of Marine Insight. Data and charts, if used, in the article have been sourced from available information and have not been authenticated by any statutory authority. The author and Marine Insight do not claim it to be accurate nor accept any responsibility for the same. The views constitute only the opinions and do not constitute any guidelines or recommendations on any course of action to be followed by the reader.
Reference: marineinsight.com